
מחקר ישראלי מצא כי תדר הקריאה של עטלפי חרקים התפתח בצורה המיטבית כדי לאתר נחילי חרקים מעופפים
פרסומת
עטלפים מכונים גם "הרואים באפלה", שכן גם בהיעדר מוחלט של אור, רובם מסוגלים לאתר טרף באמצעות גלי קול (איכון קול, או אקולוקציה): העטלפים מנווטים את דרכם באמצעות שידור גלי קול אל החלל, ובניית תמונה תלת-מימדית של הסביבה מהגלים החוזרים שפוגעים בעצמים קרובים (הד).
אבל העטלפים לא מסוגלים לאתר כל חרק באמצעות גלי קול. חרקים קטנים מדי בעלי שטח פנים קטן (לדוגמה, יתושים), ולא מחזירים הד בצורה יעילה עבור העטלף. מסיבה זו, השאלה כיצד עטלפים צדים חרקים שתאורטית אמורים להיות "בלתי-נראים" עבורם - נותרה בגדר תעלומה.
ראשית, כיצד אנחנו יודעים שהם בכלל צדים את החרקים הללו? ובכן, ניתוחי DNA ובדיקת הרכב חומרים של צואת עטלפים חשפו את הרכב המזון שלהם, וחרקים קטנים בהחלט מהווים חלק משמעותי מהתפריט. שנית, איך הם מצליחים לטרוף אותם מבלי "לראות" אותם? מחקר ישראלי שנעשה באונ' תל-אביב בהובלת פרופ' יוסי יובל ופורסם ממש אתמול בירחון המדעי PLOS Computational Biology בחן את עוצמת ההד שמתקבלת מחרקים קטנים רבים הנעים בנחיל. כל חרק מחזיר הד קטן, אך כשהם נעים בנחיל, קיימת הגברה מעריכית של עוצמת ההד - ולכבוד חנוכה המתקרב: כל אחד הוא הד קטן, וכולנו הד איתן!
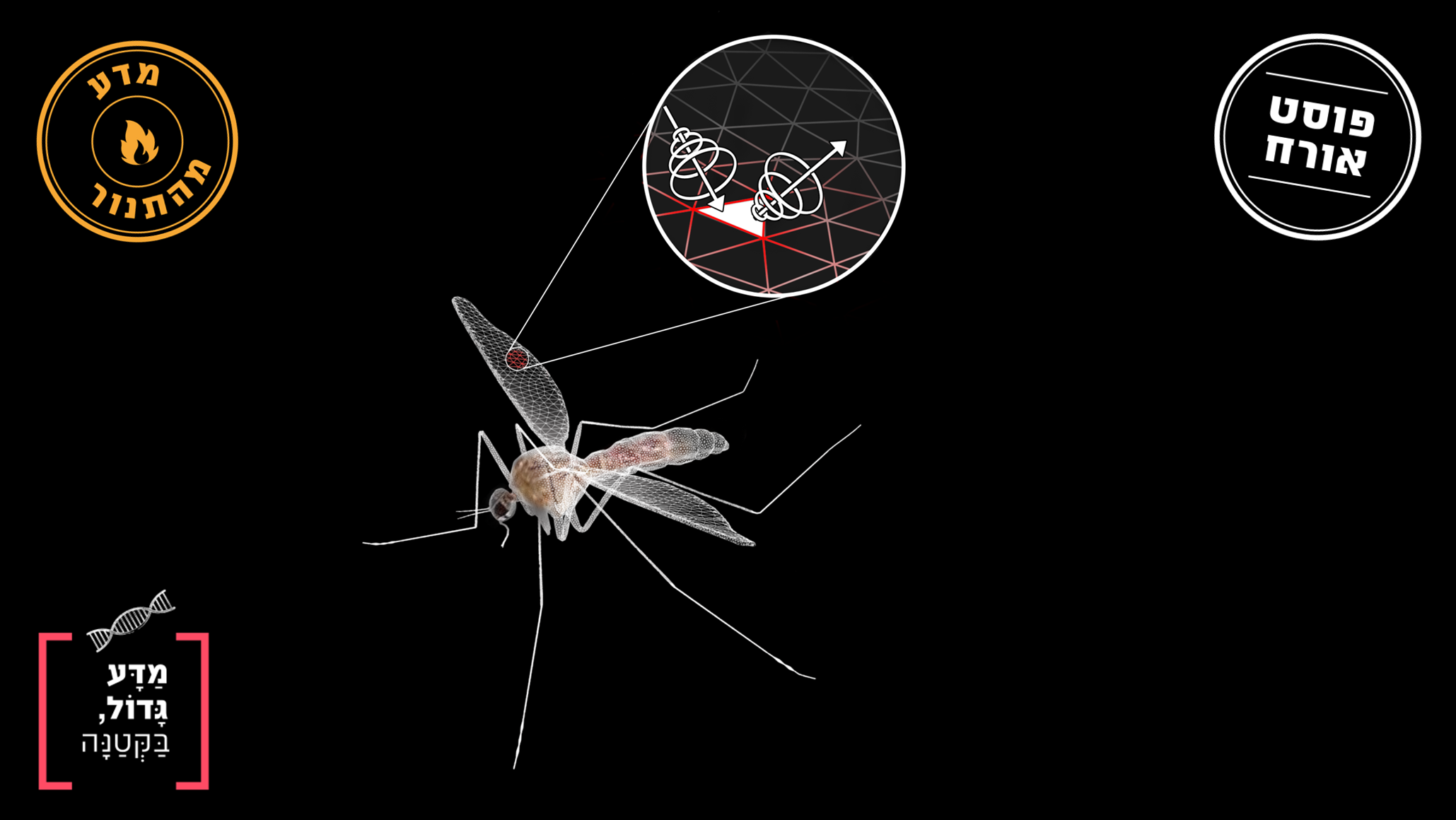
כדי לחקור את התופעה, החוקרים יצרו תמונה וירטואלית תלת-מימדית של יתוש (כדוגמה לטרף) ובאמצעות סימולציה, שידרו כלפי היתוש קריאות של עטלף חרקים והקליטו את ההד החוזר מהם. כשהחרק היה לבדו, ההד החוזר היה חלש מדי ולכן החרק היה "בלתי-נראה" עבור העטלף. בכל פעם שמכפילים את מספר החרקים בנחיל, מקבלים עלייה של 3 דציבלים בהד החוזר. סימולציה חדשנית זו אפשרה לחוקרים לשלוט על כל המשתנים המוזנים - כלומר, המרחק בין החרקים, מספר החרקים, צורת החרקים, תדרי השידור של העטלף, מספר הקריאות וכו'. אין אפשרות לעשות מחקר כזה בטבע או במעבדה, שכן לעולם לא נוכל לשלוט בצורה כזו בנחיל חרקים או בקריאות העטלף. לכן עלה הצורך בפיתוח סימולציה שכזו.
ההחזר שמתקבל מנחיל החרקים, לפעמים לא נשמע חזק בכלל עבור עטלף בשל התאבכויות הורסות של גלי הקול החוזרים (גלים באותו התדר עם הפרש של חצי מחזור יגרמו להעלמה הדדית אחד של השני), כתלות בתדרים בהם העטלף משתמש. ההנחה הייתה שהדרך הטובה ביותר לאתר טרף תהיה באמצעות שימוש בתדר אחד קבוע, אך מהקלטות בטבע אנחנו יודעים שעטלפי חרקים משנים קלות את התדר תוך כדי קריאה. למה בעצם הם עושים זאת? החוקרים מצאו באמצעות הסימולציה שהשינוי בתדר תוך כדי קריאה יעלה באופן דרמטי את ההסתברות של העטלף לאתר את הנחיל. זה בעצם כמו פיזור הסתברויות בהימורים, חלק מהתדרים יהיו מתאימים לאיתור החרקים וחלק לא. לכן כדאי לעטלף להשתמש במגוון של תדרים, ובכך להעלות את ההסתברות לזיהוי הנחיל - שכן העטלף לא יודע איזה תדר הכי טוב עבורו מראש כשהוא מתחיל לקרוא.
לאחר קבלת התוצאות המפתיעות, החוקרים בדקו את הממצאים בטבע על נחילי חרקים ומצאו שההד החוזר מנחיל שלם מקריאות עטלפים, חזק בהרבה מאלו החוזים מחרק בודד.
החוקרים מציעים שימוש יישומי לידע הבסיסי שמתקבל מהמחקר, בו ניתן ליישם את טכניקות האיתור של עטלף חרקים על מטרות קטנות שטסות במתארים שונים, לדוגמה, איתור באמצעות מכ"מ של להקות של עופות נודדים או נחילים של רחפנים בשימוש צבאי. במחקר קודם שנעשה במעבדה, פותחה מערכת ניווט אוטונומית מבוססת על אקולוקציה של עטלפים. המחקר הנוכחי יסייע בשיפור השימוש באיכון קול כטכנולוגיית ניווט של כלי רכב ורחפנים לצורך מיפוי יעיל יותר של הסביבה, כמו לדוגמה בתעשיית החקלאות, שם כבר משתמשים ברחפנים בבדיקה של גידולים דוגמת ענבים או תמרים (ניסוי בשיתוף מכון וולקני).
בתמונה: מודל רשת של חרק עליו החוקרים הריצו את הסימולציות במחקר זה. כל משטח משולש משקף הד שחוזר אל השולח במרחב הוירטואלי. קרדיט לתמונה מור טאוב.
מאת ידיד העמותה ומחבר המאמר אריאן בונמן ויומרן ניסן מצוות העמותה.
** ד"ר אריאן בונמן הינו עמית מחקר במעבדת יובל באונ' תל-אביב, הוא מומחה בינלאומי באקולוקציה וסאונד של בעלי חיים. אתם מוזמנים לשאול אותו שאלות בתגובות (באנגלית, הוא הולנדי) והוא ישמח לענות עליהן **
מקורות וקריאה נוספת:
לינק למאמר - The benefits of insect-swarm hunting to echolocating bats, and its influence on the evolution of bat echolocation signals
התאבכות בונה והורסת
לינק למאמר רובוט העטלף - A fully autonomous terrestrial bat-like acoustic robot

מנכ"ל עמותת "מדע גדול, בקטנה" (ע"ר). דוקטורנט במחלקה לזואולוגיה באוניברסיטת ת"א, חוקר עטלפים. בעל תואר שני בביולוגיה מהטכניון.





