
העין השלישית
20/06/2018
פרסומת
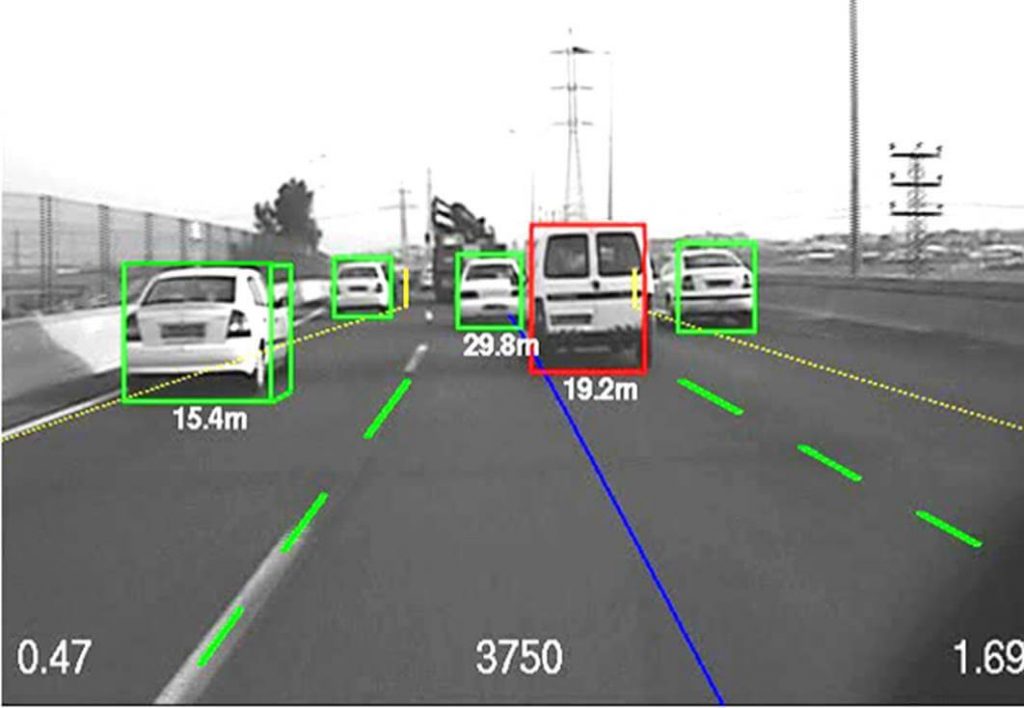
בקטנה: במהלך הרצאה ביפן בשנת 1999, נשאל פרופ' אמנון שעשוע האם יוכל להעריך מרחק מרכב נוסע באמצעות מצלמה בודדת? שעשוע ענה בחיוב [1]. בסיום ההרצאה ניגשה אליו קבוצת מהנדסים וביקשה להשקיע 250 אלף דולר בפיתוח הרעיון, שלימים הפך לחברת מובילאיי - המובילה בעולם בתחום הראייה הממוחשבת במכוניות - שנמכרה לאחרונה לאינטל תמורת 15.3 מיליארד דולר. כיום, מובילאיי היא חלק מהחיים של נהגים רבים ברחבי העולם.
מאת דורון אורנשטיין, יניב טננבאום קטן ,מירי צימקינד (רשות החדשנות)
כיצד ניתן להעריך מרחק בין רכבים באמצעות מצלמה בודדת? מצלמה היא מכשיר מורכב, אולם ניתן לתאר אותה בפשטות כקופסה עם נקב דרכו חודרות קרני האור, ומסך בדופן האחורית הנמצא במרחק הקרוי "מרחק המוקד" מהנקב. המסך בנוי מרשת חיישנים, המגיבים כשפוגע בהם חלקיק אור. באופן זה, נוצרת תמונה דיגיטלית שבה כל פיקסל נקבע לפי עוצמת האור הפוגע באותה נקודה.
בתיאור גיאומטרי, אם נמקם מצלמה בחזית הרכב ונצלם מכונית שנוסעת לפנינו, יווצרו שני משולשים דומים (ראו תרשים באתר): פנימי בתוך המצלמה וחיצוני מחוץ לרכב. בפנימי, צלע אחת מכילה את הפיקסלים המתארים את גובה המכונית המצולמת, והגובה לצלע זה הוא מרחק המוקד. בחיצוני, אחת הצלעות היא גובה המכונית שלפנינו, והגובה לצלע זו הוא המרחק של הרכב שלנו מהמכונית שלפנינו.
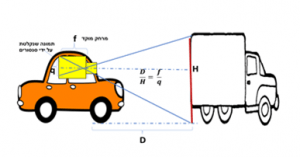
לכן, אם נדע מהו גובה המכונית, נוכל לחשב את המרחק שלנו ממנה דרך דמיון משולשים. אולם, מה יקרה כשלא ידוע מהו גובה המכונית שלפנינו? בעיה זו עמדה בפני אנשי מובילאיי כאשר פיתחו את אב-הטיפוס הראשון [2] . מטרת המערכת היא לזהות סכנות ולהתריע עליהן. לכן, הדיוק המוחלט של המדידה הוא לא קריטי, בייחוד בטווחים רחוקים.
המפתח לפיתרון הוא יצירתיות - במרחקים קטנים ובכביש מישורי, הבעיה פשוטה יותר. לכן, כדאי היה להתחיל לטפל במקרה זה.
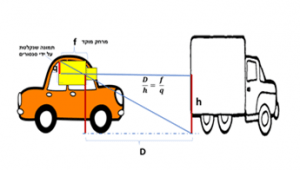
לאחר פישוט הבעיה, הגיעה ההברקה של המפתחים: מצלמה עם פלס! המצלמה הותקנה ברכב כך שתהיה מקבילה לכביש, ולתוכנה הוזן גובהה ביחס לכביש. לאחר מכן, התווסף פס סימון מיוחד של קו אופקי במרכז העדשה.
בהנחה שהכביש מישורי, כאשר המצלמה מצלמת את הרכב מלפנים, פס הסימון שעל התמונה נמצא בגובה המצלמה. אם נתעלם מהפיקסלים שמעליו, נקבל תמונה של מכונית חתוכה שגובהה ידוע (שכן זהו גובה המצלמה). כעת נוכל להשתמש בדמיון משולשים ולחשב את מרחק המכונית מהרכב שלנו.
כיצד ניתן להרחיב את הטיפול למקרים בהם המצלמה אינה מקבילה לכביש? הפתרון טמון בשילוב מצלמת ווידאו המצלמת ברצף, עם תוכנה חכמה המנתחת את התמונות. באמצעות ניתוח רצף התמונות ניתן לכייל את המצלמה גם כאשר היא איננה מקבילה לכביש, ובנוסף לשערך את מהירות המכונית שלנו.
אחת השיטות לכיול היא זיהוי נקודה מיוחדת בתמונה הנקראת (FOE (Focus of Expansion. מהי נקודה זו? בקטע הפתיחה של מלחמת הכוכבים יש סצנה בה הכוכבים כאילו "יוצאים" מנקודה באינסוף ומתרחקים ממנה בקו ישר. זאת היא נקודת FOE. אם נצלם מספר תמונות בתנועה (למשל שני פנסי רחוב בצידי הכביש), נלביש את התמונות אחת על השנייה ונמתח קווים בין הפנסים, הקווים יפגשו ב-FOE. אם המצלמה מקבילה לכביש, גובה FOE לא ישתנה במהלך הנסיעה. לכן, על ידי חישוב ובדיקת השתנות ה-FOE בין התמונות, ניתן לחשב את הטיית המצלמה ביחס לכביש ולכייל אותה.
ההדגמה הראשונית הוצגה בהצלחה בתחילת שנות האלפיים וחוללה את פריצת הדרך הגדולה של החברה. מאז השתכללה המערכת פלאים, ובנוסף לזיהוי מרחקים יודעת לזהות אירועים כמו סטייה מנתיב (שאנחנו מכירים כצפצופי אזהרה מעצבנים…). המתמטיקה לא השתנתה, אולם, כמות החישובים העצומה גרמה לחברה לפתח רכיב ייעודי להאצת החישובים (EyeQ).
המומחיות שנרכשה בחברה, קשרי הלקוחות, ורכיב ייעודי זה סוללים את דרכה של החברה לפיתוחים בחזית הטכנולוגיה [3] כמו השתלבות במיזמי מכוניות אוטונומיות ויצירת מערכת מיפוי לרכבים אוטונומיים (REM).
תחום התחבורה החכמה והרכב האוטונומי נמצא בהתפתחות עצומה. אחד הגופים המשמעותיים שתומכים ביזמים, סטרט-אפים וחברות בצמיחה הינו רשות החדשנות (לשעבר המדען הראשי). הרשות השיקה לאחרונה את תכנית התמיכה לחברות בתחום התחבורה החכמה המעוניינות לבצע פיילוטים בתשתיות ציבוריות וממשלתיות [4]
כדאי לזכור, שלפעמים גם פתרונות סבוכים מתחילים בבעיות פשוטות, שרובנו שכחנו אחרי תקופת התיכון. לפעמים לא חייבים לחפש רחוק, אלא לצאת מהקופסה ולפשט את הבעיה, במקרה של מובילאיי הפתרון הפשוט היה היצירתי ביותר!
- כתבה על חברת מובילאיי.
- מאמר על כל פיתוח ההדגמה
- על חברת מובילאי
- תכנית התמיכה לחברות בתחום התחבורה החכמה

מהנדס מחשבים, חוקר ויזם בתחום החינוך המתמטי.





