
הננובוטים באים!
28/05/2018
פרסומת
בשנים האחרונות, חלה התקדמות משמעותית ביכולת לייצר מבנים בגדלים מיקרומטריים וננומטריים - אלפית ומיליונית המילימטר. אחד מהשימושים האפשריים למבנים אלה הוא ננו-רובוטים, או בקצרה - ננובוטים, אשר יהיו מסוגלים לנוע בגוף האדם. בתוך הגוף, יוכלו הננובוטים לבצע מגוון רב של משימות, כגון הובלת תרופות למקומות מסויימים בגוף או ביצוע ניתוחים נקודתיים באופן שאינו פולשני. בנוסף, ננובוטים עשויים לשמש בתור גלאים בעלי רגישות ברמת המולקולה הבודדת ואף בהרכבה של מבנים ננומטריים אחרים.
אחת מהבעיות המרכזיות בתכנון וביישום של ננובוטים היא בעיית ההנעה: כיצד אנו יכולים להניע את הננובוטים ולשלוט בתנועתם במרחב? שאלה זו מובילה לשאלה נוספת: כיצד אנו יכולים לייעל את התהליך, כך שיצרוך כמה שפחות אנרגיה?
מאמר שפורסם לאחרונה בכתב העת science robotics, מציע פתרון חדש לבעיה [1]. המחקר בוצע על ידי קבוצה של חוקרים משלוש פקולטות שונות ממוסד הטכניון – הנדסה כימית, פיזיקה ומתמטיקה, בהובלתו של פרופ' אלכס לישנסקי [2] מהפקולטה להנדסה כימית.
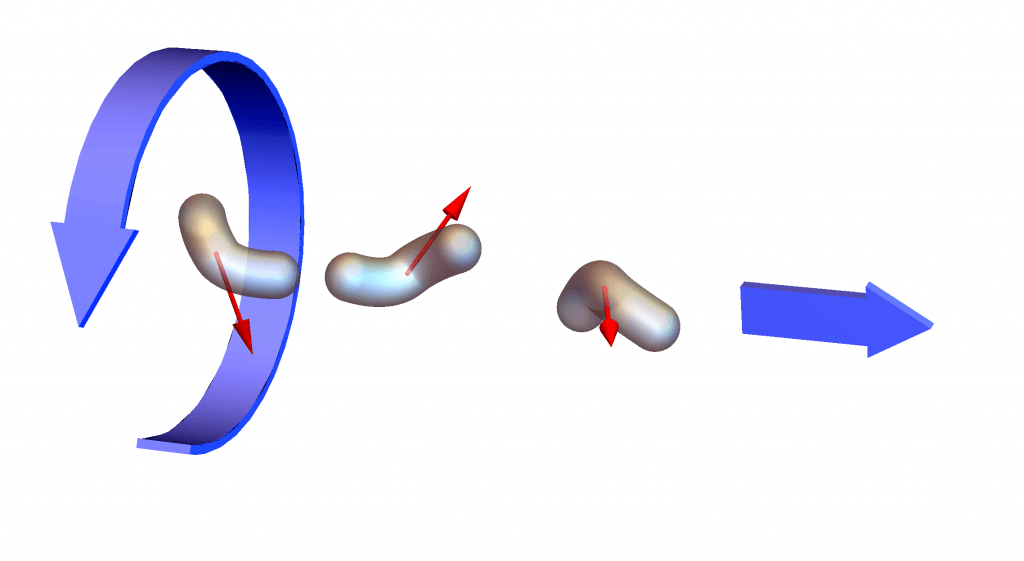
אחת הדרכים הקיימות לתנועה בתוך נוזל, היא שימוש בגוף בעל צורה של סליל. כאשר הגוף מסתובב סביב צירו, החיכוך של הסליל עם הנוזל מאפשר לו לנוע קדימה או אחורה, בהתאם לכיוון הסיבוב. דרך זו מנוצלת על ידי הטבע כבר מיליארדי [3] שנים. חיידקים מסוגלים לנוע בתוך נוזלים על ידי שימוש בשוטונים (מעין זנבות) בעלי צורה של סליל, אשר סיבובם מניע את החיידק בתוך הנוזל. כיצד ניתן לגרום לסליל להסתובב? ובכן, טכניקה אחת, עליה התבססה קבוצתו של פרופ' לישנסקי, היא שימוש בשדה מגנטי הפועל על הסליל. טכניקה זו יכולה לפעול כאשר הסליל מורכב מחומר אשר מגיב לשדה המגנטי. אם יופעל שדה מגנטי המסתובב במרחב עם הזמן, הסליל יגיב לשדה המסתובב ויסתובב גם הוא, וכך יוכל לנוע. נציין, שבטכניקה זו השדה החיצוני מספק את האנרגיה הדרושה להנעה, ולכן לננובוטים אין צורך במקור אנרגיה "אישי" (כמו למשל סוללה קטנה).
שיטה זו נשמעת פשוטה למדי, אולם מסתבר שיעילות ההנעה של סליל כזה תלוייה בצורה ניכרת בגיאומטריה שלו. מכיוון שכך, נרצה לדעת - מהו המבנה האופטימלי? כלומר, מהו המבנה שיאפשר לסליל (ולננובוט) להתקדם את המרחק הגדול ביותר עבור סיבוב אחד סביב צירו?
בשנים האחרונות, קבוצות מחקר רבות ניסו לענות על השאלה, והדעה הרווחת הייתה שהמבנה האופטימלי הוא זה שאנו רואים אצל חיידקים בטבע. כאן נכנסת לתמונה קבוצתו של פרופ' לישנסקי. בניגוד לשוטונים בטבע, אשר מסתובבים סביב ציר קבוע, סלילים הנמצאים בשדה מגנטי מבצעים בנוסף תנועה הנקראת "נקיפה". נקיפה היא תנועה שבה גם ציר הסיבוב של הסליל מבצע בעצמו תנועה סיבובית קלה - כמו בסביבון - והיא לא נלקחה בחשבון עד כה. על ידי שימוש במודלים חישוביים מתקדמים, הקבוצה הצליחה להראות שקיימות צורות מסוימות של סלילים אשר יעילות הרבה יותר ממקבילותיהן הקיימות בטבע! תוצאה זו מעניינת ומפתיעה, מכיוון שמבנים בטבע עוברים תהליך אופטימיזציה לאורך מיליארדי שנות אבולוציה, ולכן לרוב הם מאד יעילים. מצד שני, יש לזכור שסלילים מתכתיים המונעים על ידי שדות מגנטיים הם המצאה של בני האדם, ולכן הגיוני לצפות שבתנאים מסוימים יהיו יעילים ממבנים טבעיים מקבילים. הצורה האופטימלית שהתקבלה במחקר זה לא דומה לסליל טיפוסי, אלא מזכירה קשת עבה עם קצוות מפותלים. למרות הצורה המוזרה, היא מראה מהירויות הנעה הגבוהות פי כמה מאלו שהוצגו במחקרים קודמים בתחום.
לסיכום, הקבוצה בראשות פרופ' אלכס לישנסקי פענחה תצורה חדשה של סלילים, המשמשים להנעת רובוטים זעירים תחת השפעה של שדה מגנטי בסביבה נוזלית. תוצאה זו מהווה שיפור ניכר לתצורות הקיימות ועשויה לקדם משמעותית את תחום הננו-רובוטיקה ובכך את עולם הרפואה.
קרדיט תמונה: דוברות הטכניון
מקורות:
[1]: המאמר שהתפרסם בכתב העת science robotics:
https://goo.gl/Q5BzA6
[2]: עוד על פרופ' אלכס לישנסקי:
https://goo.gl/fzGj37
[3]: על מקורם של השוטונים:
https://goo.gl/v1SLUo

ולרי הוא פרופסור באוניברסיטת בוסטון. במעבדתו הוא חוקר תופעות מתח פנים ופיזיקה של זורמים, עם יישומים במיקרוזרימה, אופטיקה, הדפסת תלת-ממד, וייצור בתנאי מיקרו-כבידה. כמו כן, הוא חוקר אנלוגים הידרו-דינאמיים למערכות קוונטיות, שאלו מערכות זורמים המדמות מערכות קוונטיות.





